ItWorks.id- Badan Riset dan Inovasi Nasional (BRIN) mengembangkan kerangka digital twin untuk mendukung integrasi keselamatan struktural dan perilaku pada kendaraan otonom. Teknologi ini dinilai mampu memantau sekaligus memprediksi potensi kerusakan kendaraan secara real time.
Perekayasa Ahli Madya Pusat Riset Sains Data dan Informasi BRIN, Nimas Ayu Untariyati, menjelaskan digital twin merupakan representasi virtual kendaraan yang dapat memantau interaksi antara keputusan sistem otonom dengan dampaknya terhadap kondisi fisik kendaraan.
Menurut Nimas, selama ini pengujian kendaraan otonom lebih banyak berfokus pada kecerdasan sistem dalam merespons kondisi jalan, seperti kemampuan menghindari tabrakan. Padahal, gaya berkendara kendaraan otonom juga berpengaruh terhadap kondisi struktur kendaraan.“Melalui pendekatan digital twin, kami mengintegrasikan aspek perilaku dan kondisi fisik kendaraan secara simultan, sehingga potensi kerusakan struktural dapat dipantau dan diprediksi sejak dini,” ujarnya dirilis Humas BRIN melalui portal web (18/05/2026), di Jakarta.
Ia menuturkan, sistem ini memanfaatkan data dari sensor bawaan kendaraan sehingga implementasinya dapat dilakukan secara efisien tanpa memerlukan perangkat tambahan yang kompleks.
Tiga Tahapan Utama
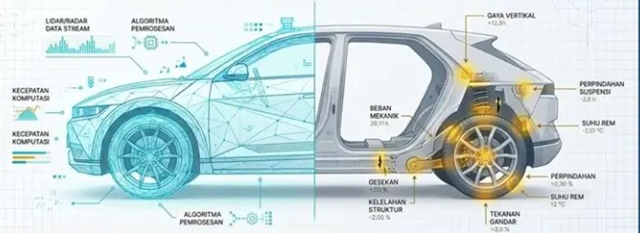
Kerangka digital twin yang dikembangkan BRIN terdiri atas tiga tahapan utama, yakni tahap perilaku yang merepresentasikan keputusan sistem kendaraan, tahap fisik gerak yang menghitung distribusi beban akibat manuver, serta tahap kondisi struktur yang mengevaluasi potensi kerusakan pada rangka dan suspensi kendaraan.
Ketiga tahapan tersebut bekerja secara berkelanjutan selama kendaraan beroperasi. Menurut Nimas, dinamika seperti pengereman, akselerasi, dan manuver belok menyebabkan distribusi beban terus berubah dan dalam jangka panjang dapat memicu kelelahan material atau fatigue yang berpotensi merusak struktur kendaraan. “Sistem dapat mengestimasi tingkat tekanan dan akumulasi kerusakan sebagai dasar analisis kondisi kendaraan secara real time,” katanya.
Hasil penelitian ini dinilai berpotensi mendukung pengembangan sistem perawatan prediktif kendaraan otonom, meningkatkan standar keselamatan berbasis integrasi sistem dan struktur, serta mendorong desain kendaraan yang lebih adaptif terhadap pola operasi otonom. (AC)














{kind=link}